
|
|
文章詳情
氣動機械手的手指手部手腕手臂結構整體設計方案 二維碼
2204
對氣動機械手的基本要求是能快速、準確地拾-放和搬運物件,這就要求它們具有高精度、快速反應、一定的承載能力、足夠的工作空間和靈活的自由度及在任意位置都能自動定位等特性。設計氣動機械手的原則是:充分分析作業(yè)對象(工件)的作業(yè)技術要求,擬定最合理的作業(yè)工序和工藝,并滿足系統(tǒng)功能要求和環(huán)境條件;明確工件的結構形狀和材料特性,定位精度要求,抓取、搬運時的受力特性、尺寸和質量參數等,從而進一步確定對機械手結構及運行控制的要求。 機械手的整體設計方案 盡量選用定型的標準組件,簡化設計制造過程,兼顧通用性和專用性,并能實現柔性轉換和編程控制.本次設計的機械手是通用氣動上下料機械手,是一種適合于成批或中、小批生產的、可以改變動作程序的自動搬運或操作設備,動作強度大和操作單調頻繁的生產場合,它可用于操作環(huán)境惡劣的場合。  1、機械手的座標型式與自由度 按機械手手臂的不同運動形式及其組合情況,其座標型式可分為直角座標式、圓柱座標式、球座標式和關節(jié)式。由于本機械手在上下料時手臂具有升降、收縮及回轉運動,因此,采用圓柱座標型式。相應的機械手具有三個自由度,為了彌補升降運動行程較小的缺點,增加手臂擺動機構,從而增加一個手臂上下擺動的自由度。(如圖2-1所示)  2、機械手的手部結構方案設計 為了使機械手的通用性更強,把機械手的手部結構設計成可更換結構,當工件是棒料時,使用夾持式手部;當工件是板料時,使用氣流負壓式吸盤。 3、機械手的手腕結構方案設計 考慮到機械手的通用性,同時由于被抓取工件是水平放置,因此手腕必須設有回轉運動才可滿足工作的要求。因此,手腕設計成回轉結構,實現手腕回轉運動的機構為回轉氣缸。 4、機械手的手臂結構方案設計 按照抓取工件的要求,本機械手的手臂有三個自由度,即手臂的伸縮、左右回轉和降(或俯仰)運動。手臂的回轉和升降運動是通過立柱來實現的,立柱的橫向移動即為手臂的橫移。手臂的各種運動由氣缸來實現。 5、機械手的驅動方案設計 由于氣壓傳動系統(tǒng)的動作迅速,反應靈敏,阻力損失和泄漏較小,成本低廉因此本機械手采用氣壓傳動方式。 6、機械手的控制方案設計 考慮到機械手的通用性,同時使用點位控制,因此我們采用可編程序控制器(PLC)對機械手進行控制。當機械手的動作流程改變時,只需改變PLC程序即可實現,非常方便快捷。 7、機械手的主要技術參數 (一)機械手的**抓重是其規(guī)格的主參數,由于是采用氣動方式驅動,因此考慮抓取的物體不應該太重,查閱相關機械手的設計參數,結合工業(yè)生產的實際情況,本設計設計抓取的工件質量為5公斤。 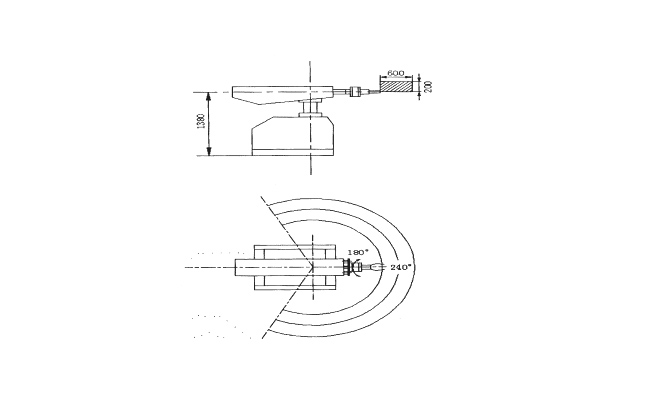 (二)基本參數運動速度是機械手主要的基本參數。操作節(jié)拍對機械手速度提出了要求,設計速度過低限制了它的使用范圍。(如圖2-2所示)而影響機械手動作快慢的主要因素是手臂伸縮及回轉的速度。該機械手**移動速度設計為。**回轉速度設計為。平均移動速度為。平均回轉速度為。機械手動作時有啟動、停止過程的加、減速度存在,用速度一行程曲線來說明速度特性較為全面,因為平均速度與行程有關,故用平均速度表示速度的快慢更為符合速度特性。除了運動速度以外,手臂設計的基本參數還有伸縮行程和工作半徑。大部分機械手設計成相當于人工坐著或站著且略有走動操作的空間。過大的伸縮行程和工作半徑,必然帶來偏重力矩增大而剛性降低。在這種情況下宜采用自動傳送裝置為好。根據統(tǒng)計和比較,該機械手手臂的伸縮行程定為600mm,**工作半徑約為。手臂升降行程定為。定位精度也是基本參數之一。該機械手的定位精度為。 (三)用途: 用于自動輸送線的上下料。  |

臺州捷眾智能裝備有限公司 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: www.gzfc168.cn 地 址: 浙江省臺州市玉環(huán)市清港徐斗工業(yè)區(qū) | 捷眾智能裝備阿里巴巴 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: jiezhongcnc.1688.com 地 址: 浙江省臺州市玉環(huán)市清港徐斗工業(yè)區(qū) | 捷眾微信公眾號 |  掃一掃手機網站 |