
|
|
文章詳情
外圓磨床上的氣動機械手控制系統及動作順序設計 二維碼
1461
引言:氣動機械手是一種模仿人手動作,并按設定的程序、軌跡和要求代替人工手抓取、搬運工件或操持工具進行操作的機電一體化自動化裝置。 氣動機械手的電氣控制系統是通過控制氣缸電磁換向閥來實現不同的動作,有采用單片機控制的,也有采用可編程控制器來控制的。若采用單片機控制,由于電磁閥的工作電壓高于單片機的+5V電源,所需驅動電流較大,因而需設計功率接口電路,還要進行抗干擾及其可靠性的設計。采用PLC控制,則無需考慮上述問題。PLC及其高可靠性、靈活性、豐富的I/O接口等優點而被廣泛應用于各種自動化生產設備和生產線上。 一、氣動機械手的結構簡介 圖一是一機械手的整機結構示意圖,其控制定位方式為多點位控制,驅動方式采用氣壓傳動,手指具有夾緊,、放松的功能,手臂具有伸縮、回轉的功能。 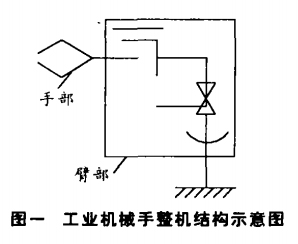 二、機械手的氣動系統簡述 氣動機械手的氣壓傳動系統如圖二所示。  機械手的全部動作都有氣缸驅動:雙作用直線氣缸(伸/縮)、氣馬達(回轉/反轉),單作用直線氣缸(夾緊/松開)。而所有氣缸的動作又由相應的電磁閥控制。 夾緊氣缸采用了兩個單向節流閥串聯進行雙向速度調節。伸縮氣缸和回轉氣缸采用了出口節流調速,運動平穩性較進口節流調速好,能承受負值載荷。 為了使機械手在工作過程中實現自動或手動運行及運動的安全可靠,選用限位開關(伸/縮、回轉/反轉位置控制)給相應的電磁閥傳遞通、斷信息。 工作時先啟動空壓機,空氣經氣動三聯件輸送到管路中;控制電路使氣動機械手按規定的要求動作。 三、機械手的動作順序 設定的氣動機械手的動作順序如圖三所示。 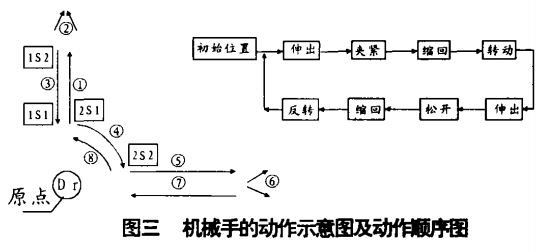 以上就是外圓磨床上的氣動機械手控制系統及動作順序的介紹,如果還有其他疑問,歡迎來咨詢我們。下面是我們的公眾號,歡迎關注。  |

臺州捷眾智能裝備有限公司 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: www.gzfc168.cn 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾智能裝備阿里巴巴 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: jiezhongcnc.1688.com 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾微信公眾號 |  掃一掃手機網站 |