
|
|
文章詳情
工業(yè)機器人的電動傳動裝置介紹及其根本性的特點 二維碼
1096
在不久前電動傳動的機器人還是為數(shù)不多的,并且大部分機器人具有氣動或液壓傳動裝置。但是,正像前面已指出的那樣,近幾年來電動傳動的工業(yè)機器人機械手的數(shù)量很快增多。這首先是與機電式機器人有一些根本性的優(yōu)點有關(guān),如易于安裝和調(diào)整,使用方便,不需要管道,工作時噪聲水平低等等。 在不久前,由于沒有相應(yīng)的專用電動機,機電式機器人的發(fā)展還是受到限制的。可是這一空白逐漸地給填補上了。這是因為研制出了參數(shù)有很好改進(jìn)的電動機,例如過載能力高的電動機,轉(zhuǎn)子轉(zhuǎn)動慣量小的電動機,以及研制出了新型原理的電動機,如圓柱形轉(zhuǎn)子或圓盤式的印刷電動機,光滑轉(zhuǎn)子電動機,直線運動電動機等。 工業(yè)機器人既可采用離散作用,又可采用連續(xù)作用的電動傳動裝置。點位控制的以及按循環(huán)控制的機器人采用離散作用的電動傳動裝置,它的原理圖如圖1所示。在這里為保證在給定點上定位,速度是按離散式(有級的)進(jìn)行控制。在最簡單情況下,這可以是繼電方式控制的電動機。此時最常用的是交流電動機,而用起動器或繼電器作為功率放大器。 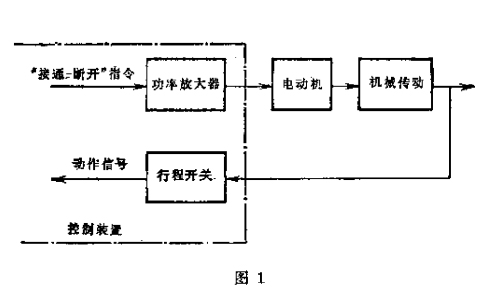 通常用如下方法實現(xiàn)變速; (1)當(dāng)使用直流電動機時,采用在點樞回路中串入降壓電阻方法變速; (2)當(dāng)使用交流電動機時,采用切斷某對磁極的方法或轉(zhuǎn)接到其它電動機的方法變速。 用彈簧阻尼器或各種形式的制動器制動。 在輪廓控制中,要求連續(xù)地控制傳動裝置的位移和速度。在這種傳動裝置中,和連續(xù)作用電機一樣,步進(jìn)電機也同樣得到了應(yīng)用。步進(jìn)電機能保證定位精度為一個步距,而相應(yīng)的速度精度為單位時間內(nèi)的一個步距。由于步距很小,步進(jìn)電機傳動的精度實際上與連續(xù)作用傳動的精度相當(dāng)。 在工業(yè)機器人中采用電動傳動裝置有一些根本性的特點。**個特點是,和所有的工業(yè)機器人的傳動裝置一樣,機器人在因機器人機械手形狀變化而使負(fù)載強烈變化的條件下工作,這就導(dǎo)致對電動傳動裝置的剛度有一定的要求,所以工業(yè)機器人的電傳動裝置通常要有,例如說,單獨的速度穩(wěn)定回路。在此種情況下常常是用直流測速發(fā)電機作為速度傳感器。 工業(yè)機器人傳動裝置工作狀態(tài)的第二個特點是,歸算到輸出軸上的負(fù)載轉(zhuǎn)動慣量變化非常大(甚至可達(dá)幾十倍),而且這種變化還和機械手的各環(huán)節(jié)的相應(yīng)位置的變化有關(guān)。既然上述的變化是直接發(fā)生在由傳動裝置完成的程序運動的過程中,那么對傳動裝置的動態(tài)特性也應(yīng)提出相應(yīng)的要求。 工業(yè)機器人的電動傳動裝置的第三個特點是,在實現(xiàn)移動中必須保證無振動,及無超調(diào),為的是方式機械手對服務(wù)設(shè)備和生產(chǎn)裝置產(chǎn)生沖擊。 有感覺的機器人采用電動傳動裝置時,除上述要求外,還附加有許多特殊要求。這些要求首先是因為必須實現(xiàn)更復(fù)雜的和靈活的控制算法。其中包括改變機械特性,改變啟動制動狀態(tài),按外界環(huán)境的信息來控制作用力,等等。這在特殊情況下更為必要,例如當(dāng)完成一連串的裝配工序時,對易碎的物品進(jìn)行操縱時,和需要由機械手的協(xié)調(diào)動作來完成要求的坐標(biāo)控制工序時。實現(xiàn)上述各種控制,通常通過控制裝置來改變機器人機械手各運動自由度的傳動來實現(xiàn)。  |

臺州捷眾智能裝備有限公司 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網(wǎng) 址: www.gzfc168.cn 地 址: 浙江省臺州市玉環(huán)市清港徐斗工業(yè)區(qū) | 捷眾智能裝備阿里巴巴 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網(wǎng) 址: jiezhongcnc.1688.com 地 址: 浙江省臺州市玉環(huán)市清港徐斗工業(yè)區(qū) | 捷眾微信公眾號 |  掃一掃手機網(wǎng)站 |