
|
|
文章詳情
機器人機械手不同類型氣動傳動裝置的介紹和特性 二維碼
642
現代機器人的發展趨勢之一是廣泛采用具有簡化運動學特性(當小于5個自由度時)和循環控制的專用機器人,因為完成最簡單操作的機器人可靠性高,價格便宜。使用長行程的氣缸和旋轉式的氣動馬達,從結構上解決了這種機器人的問題。這樣,不用中間運動學環節和中間傳動學裝置就能直接控制執行機構。這種單自由度的機器人的氣功傳動裝置由執行馬達、配流裝置、速度節流調節器和減壓閥組成。氣動系統的供氣由一個總氣壓源供給。在個別運動自由度的供氣中可有附加的減壓閥,以便使供氣各管道中的壓力能調節到要求值。ЦРГП型氣缸可以作為氣動上下料機械手用往復式氣缸的例子。ЦРГП型氣缸可保證在工作速度小于1.5米/秒的情況下調節往復運動。 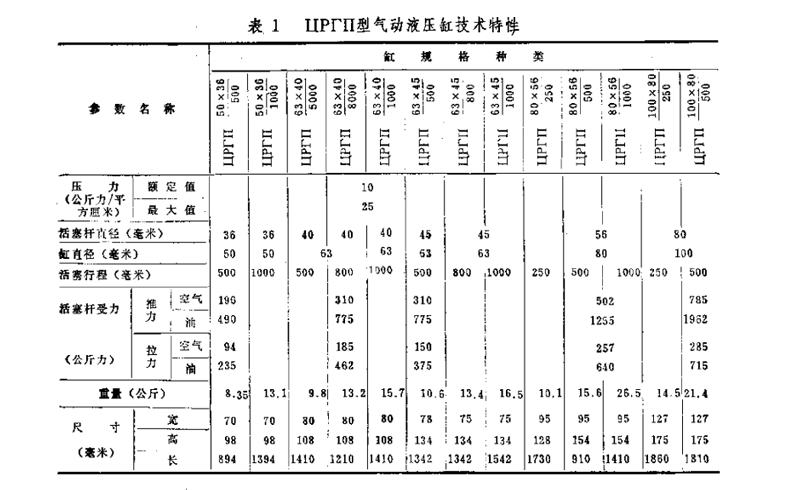 這種氣缸是由精密的圓管制成的。橡膠密封和氟化塑料墊圈結合使用可使活塞和活塞桿的摩擦力很小。ЦРГП型氣缸的技術特征如表1所列。由于裝有制動裝置,所以在這些氣缸中可以調節活塞桿行程末端的制動狀態。這種氣缸最突出的特點是密封性好、壽命長和摩擦力小。推薦用ДПГ型馬達作有限轉角的氣動馬達。下面研究液壓傳動裝置時再介紹這種馬達裝置及其技術特性。專為機器人氣動傳動裝置研制了ЦДΠ型柱塞式旋轉馬達。它和ДПГ馬達一樣用來實現機器人機械手機構的有限轉角運動。它以齒輪齒條為主要結構。 齒條在這里的作用是充當兩個同軸氣缸的活塞桿。安裝有選擇齒輪條傳動間隙的裝置。表2給出了研制出的馬達的技術特性和尺寸。 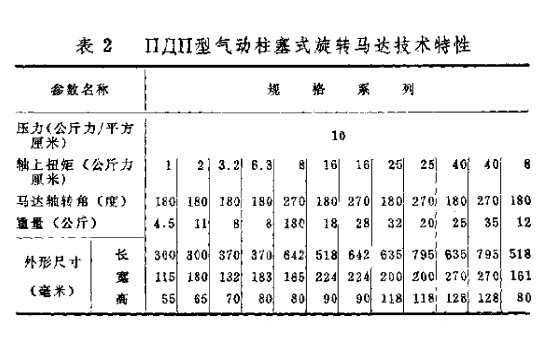 在氣動傳動裝置中,用滑閥和閥門作分配裝置。建議采用以氣-電控制的,且公稱通徑8~16毫米的4152550型兩位置或三位置的滑閥作為滑閥式氣動配流元件。表3給出了這種類型滑閥的主要技術特性。 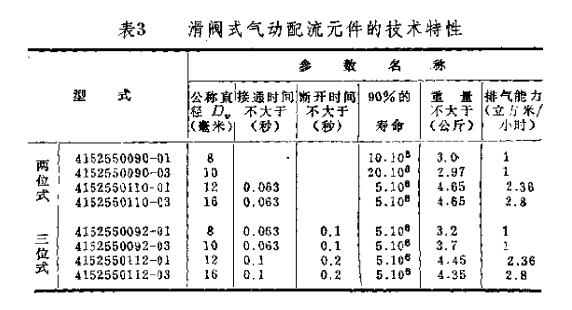 氣動配流元件最低的允許工作壓力是2.5公斤/平方厘米。 在所研究的用電控制的配流元件中,通過電-氣閥門傳遞控制壓力。閥門是根據傳遞到電磁鐵線圈上的電壓而動作的。沒有控制信號時,三位置式配流器的滑閥處在中間位置。在中間位置上,所有氣流通道都被關閉。當有控制信號傳入時,滑閥將處在一個極限位置。  |

臺州捷眾智能裝備有限公司 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: www.gzfc168.cn 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾智能裝備阿里巴巴 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: jiezhongcnc.1688.com 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾微信公眾號 |  掃一掃手機網站 |