
|
|
文章詳情
組合握持機械手的設計與應用及其工作原理的介紹 二維碼
672
自動上蓋大體上可分為三個過程,即輸送、投放和旋緊過程。輸送和投放采用送蓋裝置進行,而蓋的旋緊則利用另外一套立置機械手來完成。以上三個環節中,蓋體投放位置的準確程度將直接影響其是否能夠可靠的旋入。為此需加設導向機構。在小蓋投放前,釋放器需進引定位、夾緊和導向三個規定程序,而大蓋旋入時,因保護筒隨輸送轉盤已經定位和鎖緊,因而僅需要導向。以上程序均設定由橫向握持機械手完成。 一般,簡單的握持機械手應具有二個自由度,而手頭抓握過程的開合運動和遠離工件的移動。為減少機械手的數量,有利于結構的空間布置,可采用組合套裝形式,將小手頭設置于大手頭內部。為使兩種規格蓋體旋入時同心,應選擇保護套筒為基準對釋放器進行定位和夾緊。這將使得握持機械手的自由度增至三個,即大手頭的開合運動、小手頭的開合運動及手頭遠離工件的移動。 工作原理如圖1所示。其中件1和件4為對開合小手頭。相對于件2和件3大手頭作相對移動(A?、A?),大手頭2、3分別與手臂6和5固聯,且與伸縮桿7鉸接于0點,可相對于桿7對開合擺動(B?、B?)。 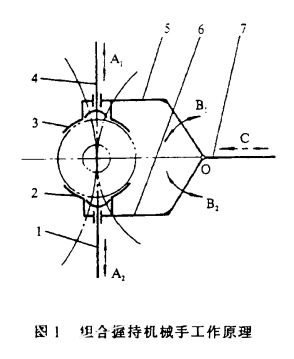 從圖1中可以看出,隨著手臂5和6向外側擺動量的增大,手頭2和3將逐漸遠離筒體。當其擺動量足夠大時,即使桿7不產生回縮運動。手頭也可以讓開筒體的輸送路線,這將使握持機械手的自由度得到簡化,由原來的三個自由度減少為二個自由度,即小手頭的開合運動(A?、A?)和大手頭的擺動(B?、B?)。  |

臺州捷眾智能裝備有限公司 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: www.gzfc168.cn 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾智能裝備阿里巴巴 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: jiezhongcnc.1688.com 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾微信公眾號 |  掃一掃手機網站 |