
|
|
文章詳情
機械手的微處理機控制系統及其軟抓取的工作過程 二維碼
1164
機械手的控制全部由微處理機來完成。圖1為機械手系統構成簡圖。該系統中微處理機有以下幾個作用:1、監視滑覺、接近覺、接觸覺三種傳感器,隨時對傳感器輸出進行采樣,然后進行判斷和處理。2、根據對傳感器判斷結果,向系統發出控制信號,此信號既是動作指令,又是希望的控制量。3、根據工作程序的要求,對機械手的動作進行順序控制。 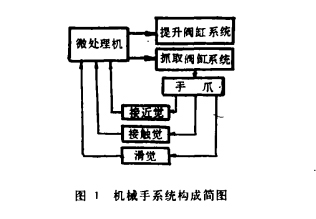 機械手進行“軟抓取”的工作過程如下。 1、微機先發出初始信號,手臂上升到一定高度,手爪張開到**位置。 2、微機發出下降信號,通過電液伺服系統,使提升缸動作,手爪下降。 3、當機械手手爪下降到接近物體時,接近覺傳感器向微機發出信號,微機按程序要求延時,使手爪繼續下降,停止在抓取物體合適的部位,并開始夾持動作。 4、當手爪閉合到與物體接觸時,接觸覺傳感器向微機發出信號。微機接到此信號后,立即發出指令,停止閉合手爪,并開始提升,同時檢測滑移信號。 5、若提升時物體發生滑移,滑覺傳感器向微機發出信號。微機接到此信號后,立即命令停止提升,并且再下降到原來的起始位置,然后按程序設定的要求,發出一個適當寬度的脈沖信號,使抓取缸運動一定距離,達到增加握力的目的。 6、手爪握力的增加量由微機延時程序控制,可通過改變延時時間,也可通過改變脈沖的電平高低來調節。延時后,微機再發出停止增加手爪握力及再次提升的指令。 7、若提升時物體無滑移,滑覺傳感器無信號輸出,夾持力不變,提升缸繼續上升,把物體提升到設定的位置。否則返回到步驟5。 整個過程的微機程序流程圖如圖2,微機程序采用匯編語言編寫。 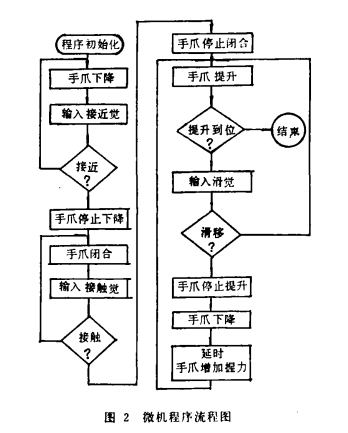 實現“軟抓取”的關鍵過程是5、6、7步。該過程的信號傳遞框圖如圖3所示。可以認為系統的輸出目標值是△W等于或略小于零,即希望握力產生的摩擦力等于或略大于物體的重量。在抓取不同重量物體的過程中,該系統能自動調整握力,達到新的平衡。 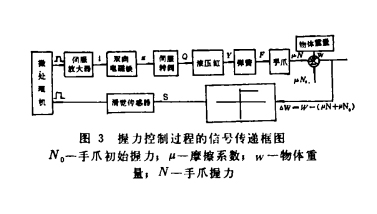 對于微處理機來講,輸入量是各傳感器的輸出脈沖信號,而輸出是不同幅寬的脈沖信號。脈沖信號的幅值通過各處的工作電壓來調整,在工作過程中一般不再改變。整個過程采用脈沖信一號來控制,因此信號處理簡單,可省去一般需用D/A和A/D轉換,僅用PIO接口就可以,這是本系統的一個特點。 在試驗中,首先用機械手抓取軟木的試驗,并人為地制造滑移,取得成功后,分別對空火柴盒、玻璃瓶、鋼塊進行了抓取試驗。抓取空火柴盒時,初始握力(即接觸覺傳感器的導通力)就可抓起,沒有發生滑移;而抓取玻璃瓶和鋼塊時,初始握力不足,發生滑移,并經過幾次增加握力后,物體才被抓起。 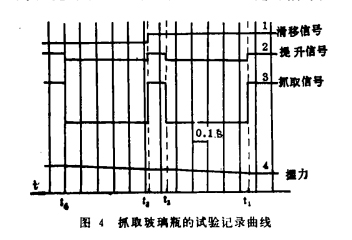 圖4是抓取玻璃瓶時,用光線示波器記錄的試驗曲線。曲線1為從滑覺傳感器取出的滑移信號,電位變化表示有滑移;曲線2為從提升缸的伺服放大器取出的提升信號,高電位表示提升,曲線3為從抓取缸的伺服放大器取出的抓取信號,低電位表示抓取;曲線4為取自抓取缸位移量的握力信號,曲線向上表示握力增加。  |

臺州捷眾智能裝備有限公司 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: www.gzfc168.cn 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾智能裝備阿里巴巴 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: jiezhongcnc.1688.com 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾微信公眾號 |  掃一掃手機網站 |