
|
|
文章詳情
氣動機械手的主要執行機構有手指手腕及手臂介紹 二維碼
1175
氣動機械手的主要執行機械包括有手指、手腕及手臂。這些機構,是設計的主要內容。  一、手指(抓取機構) 它是直接與工作接觸的構件,具有人的手指和手掌的功能,用作夾緊和放松工件。 在設計抓取機構時,要注意以下幾個問題: 1、應具有一定的開閉角度 手爪具有足夠的開閉角度才能保證適應工件尺寸不同及手爪運動路線的不同。 2、應具有足夠的夾緊力(握力) 在確定夾緊力時,除應考慮工件的重量外,還應考慮到在傳遞工件過程中慣性力的影響。 3、應保證工件可靠的定位 為了準確地把工件夾緊在一定的位置,必須根據工件的形狀選用相應的手爪形狀。 4、手爪要有足夠的強度、剛度及動作的靈活性。 由于這種抓取機構的結構簡單、動作靈敏、手爪開閉角度大、握力大等特點,應用較廣。 二、手腕 手腕是連接手指和手臂的構件。其作用是調整或改變工作的方位。手腕設計的關鍵是自由度的確定,應遵循的原則是: 1、當在手臂運動的范圍內可以滿足抓取工作和傳送的要求時,盡可能不選用手腕的工作,以使機械手結構簡單、制作方便、成本低廉。 2、當工作定位后又需要翻轉時(常為90°或180°),一般就要采取手腕實現翻轉(多用回轉氣缸)。 當機械手將工件送到某一工位前,為了使工件定位夾緊得更正確和牢固,有時要增加Y軸方向少量的移動運動,這就是要采用腕部直線運動氣缸來實現。 總之,手腕自由度的選取,應在手臂自由度確定以后,再根據工件的料道位置、工藝要求、應用范圍、制作成本等方面去考慮。 三、手臂 手臂是支承手腕、手指的構件。它的動作范圍比較大,一般機械手的手臂具有前后伸縮、上下升降、左右擺動、上下俯仰四個動作。根據需要,亦可只選其一、兩個動作。在設計手臂時首先要確定適合需要的自由度,繼而確定手臂的結構、核算手臂的運動速度、行程范圍、**臂力等等。 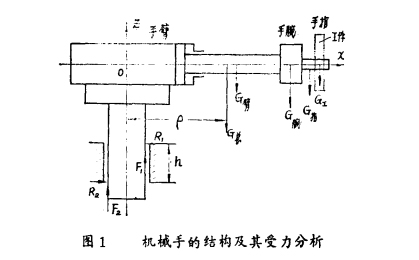 圖1繪出了氣動機械手結構示意圖。確定手臂的結構形式,必須根據手臂安裝形式、抓取重量、動作自由度、座標型式等因素。應全面分析手臂受力情況,將其合理地分配給手臂各部位,避免出現不利的受力狀態。 手臂的長度對手臂的剛度和慣性沖擊影響有決定性的影響。工字形截面的彎曲剛度為圓截面的10~20倍,空心管的扭轉剛度為實心軸的4~5倍,其彎曲剛度也強得多。手臂的長度對手臂的剛度和慣性沖擊影響較大。因此,不但要盡量縮短手臂長度,而且要使手臂未伸出時的總重心偏于伸出方向的反側,待手臂伸出時的總重心趨近于手臂的回轉中心。在編制動作程序時,應盡量先作手臂縮回動作,然后回轉,以減少慣性沖走。 為保證手臂伸出時立柱不下滑,在設計時要保證,手臂手腕手指等結構的總質量重心與立柱中心線的距離ρ與立柱導套高度h之間,應具有下述關系:h>0.32ρ。手臂的伸縮、升降用直線氣缸來實現,擺動和回轉,用回轉氣缸來實現。為保證手指不偏轉,手臂的伸縮常設有導向裝置,如2所示。 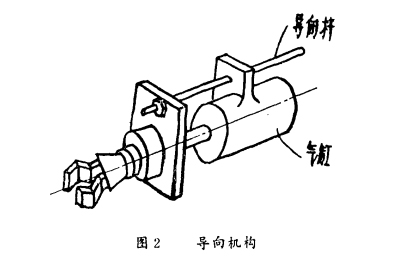 最后,在確定手臂的運動速度時,一般要小于1.5米/秒(亦即活塞運動速度)。回轉角速度,亦取小于180度/秒。速度太大,將引起沖擊和振動。  |

臺州捷眾智能裝備有限公司 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: www.gzfc168.cn 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾智能裝備阿里巴巴 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: jiezhongcnc.1688.com 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾微信公眾號 |  掃一掃手機網站 |