
|
|
文章詳情
機械手工作原理,機械手工作原理圖解 二維碼
16967
機械手是一種機械手臂,通常是可編程的,與人的手臂有相似的功能;手臂可以是機構的總和,也可以是更復雜的機器人的一部分。這種機械手的連接通過關節連接,允許旋轉運動(例如在關節式機器人中)或平移(線性)位移。關節式機器人的工作原理其實非常類似于人類手臂的運動特性,人手是通過關節與骨骼以及肌肉的組合運動,才實現了聽從大腦指揮并有條件反射等行為;而關節式機器人就是根據人類的這種特性,再通過人類智慧的“結晶”才成功研制的。 我們重點來說明一下線性機械手或者桁架機械手的工作原理,下面將通過圖文結合的方式來詳細分析這類機械手的工作原理。 機械手工作原理圖解: 機械手臂是模仿人類手臂動作的機器,它也可以懸掛在桁架上,這種機械手稱為桁架機械手。它由多個梁和機械手總成組成,機械手臂的一端懸掛于橫向模組上,另一端則有手腕和手指,手腕可以多自由度旋轉,手指可以裝夾物體,它們都可以被人類直接或遠距離控制。然而,桁架機械手只是各種不同機械手臂中的一種。 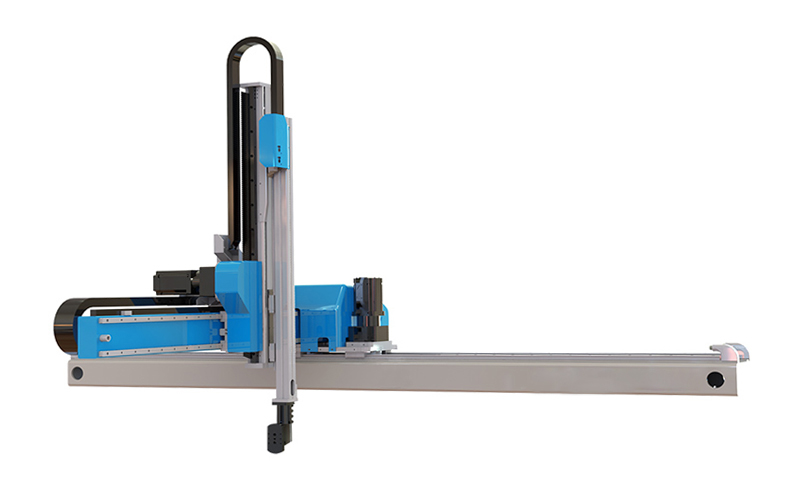 圖中機械手是伺服電機驅動的三軸桁架機械手,簡單解釋一下三軸的意思,其實可以簡單理解為這臺機械手是由三個伺服電機組成的。圖中可以明顯看到的有兩臺伺服電機,還有一臺伺服電機是控制前后移動的機械手臂部分,在整臺機械手的后方,所以圖中未能看到。 然后我們來解釋一下其余兩臺伺服電機的作用。橫向臂上面的這臺伺服電機是控制橫向臂上的縱向和橫向機械手臂的整體橫向移動,可以在橫向臂上任何位置精準定位。縱向臂上的伺服電機自然是控制縱向臂的上下移動動作,同時也是抓取物料的關鍵機械手臂和需要做到最精準的伺服電機的組合。 機械手臂可以像鑷子一樣簡單,也可以像假肢一樣復雜。換句話說,如果一個機構能抓住一個物體,抓住一個物體,像手臂一樣傳遞物體,那么它可以被歸類為機械手。最近的進展已經帶來了未來醫學領域的改進,包括假肢和機械手臂。當機械工程師建造復雜的機械手臂時,目標是讓手臂完成普通人類無法完成的任務。 本文地址:http://www.gzfc168.cn/(轉載請注明出處)  |

臺州捷眾智能裝備有限公司 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: www.gzfc168.cn 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾智能裝備阿里巴巴 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: jiezhongcnc.1688.com 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾微信公眾號 |  掃一掃手機網站 |