
|
|
文章詳情
電弧焊機器人的點位控制裝置特點介紹和結構分析 二維碼
756
兩個機械部分之間的運動自由度分開,這是所研究的機器人的結構特點。有三個運動自由度,一個屬于位置控制器,二個屬于機械手。機器人機械手用途是焊接簡單的焊縫,即只要求沿直線或圓周運動的焊接。被焊接的零件用夾具固定在位置控制器的花盤上,機器人的程序穿在穿孔紙帶上,因此,控制裝置中要有讀紙帶的裝置和輸出裝置。圖1給出了機器人示教原理圖。 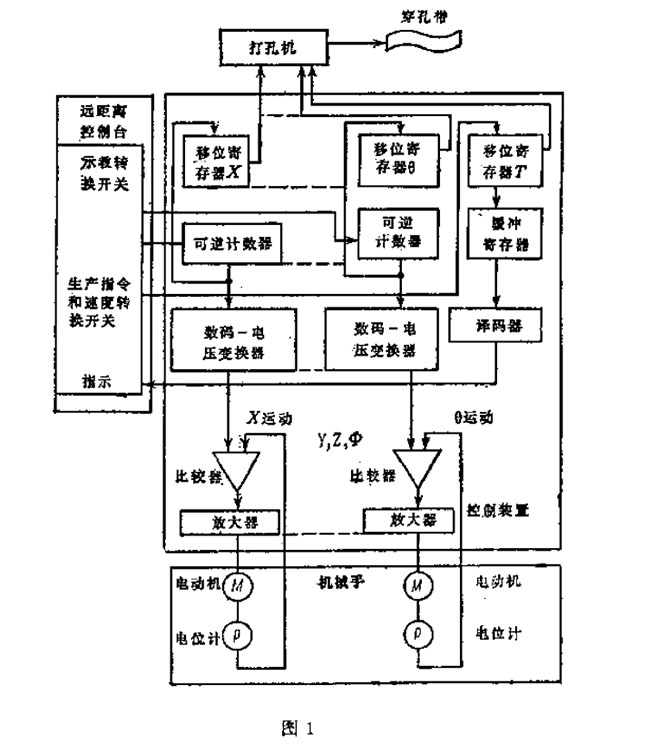 在示教狀態下,操作者用遠距離控制臺上的轉換開關,給可逆式坐標計數器加入一定數量脈沖,就能控制位置控制器和機械手的環節的運動。計數器中形成的數字碼經由十二位數碼-電壓變換器變換成電壓,之后加到伺服傳動裝置的比較器中。這一電壓和從電位計傳感器上得到的位置信號的實際值進行比較。由直流電動機組成的機器人伺服傳動裝置使上述比較出的差值信號趨于零,這樣就使環節達到了所要求的位置。 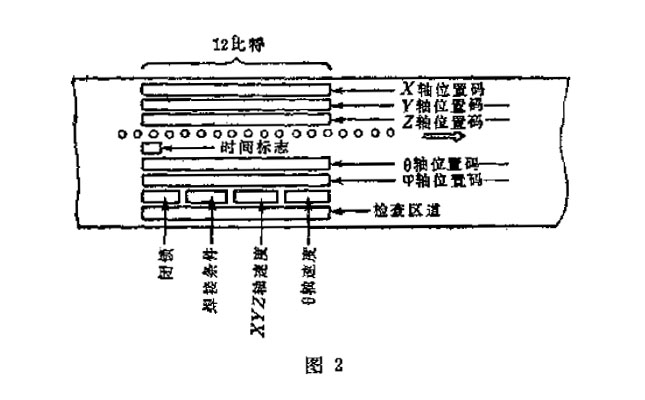 環節的位置數字碼從可逆計數器輸出端以并行碼形式轉儲到移位寄存器Х——θ中。操作者借助給定生產指令和速度的轉換開關,在移位寄存器Т中編排閉鎖信息、焊接參數信息、沿Х、Y、Z軸和θ軸的運動速度的信息。在一個程序段信息編排好之后,根據控制臺的信號,保存在移位寄存器中的信息以串行碼形式送到穿孔機中,并穿在穿孔紙帶上。圖2標出來了在穿孔紙帶上一個程序段信息的配置情況。 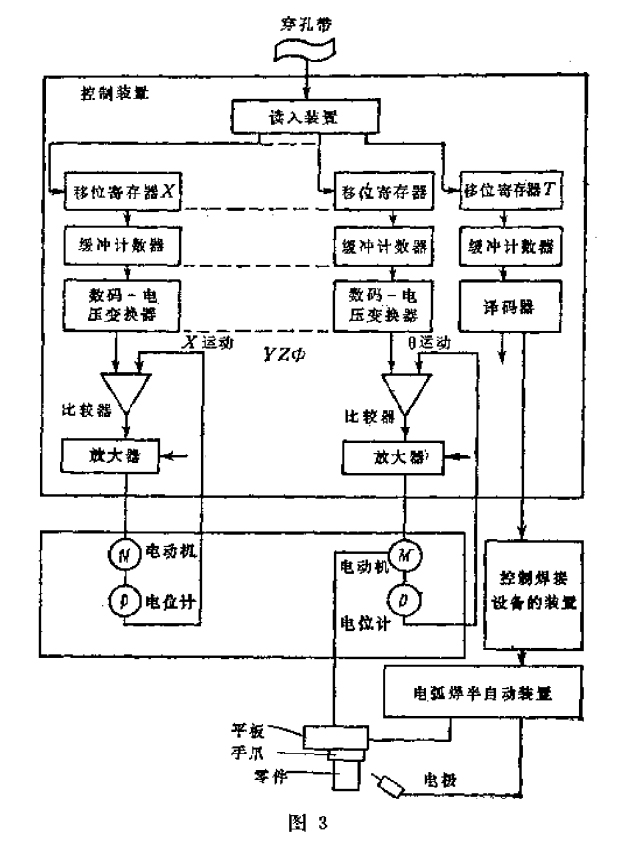 圖3給出了機械手執行程序的原理圖。從穿孔紙帶上將信息以串行碼的形式送到移位寄存器,之后以并行碼形式轉儲到緩沖部件中(計算器和寄存器)。再后,按上述所說的方法處理坐標給定值。生產信息和速度信息送到譯碼器,并以一般方法進行處理。機器人的控制系統保證電極相對焊件的定位精度為±0.5毫米。  |

臺州捷眾智能裝備有限公司 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: www.gzfc168.cn 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾智能裝備阿里巴巴 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: jiezhongcnc.1688.com 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾微信公眾號 |  掃一掃手機網站 |