
|
|
文章詳情
機械手位置控制裝置示教狀態下的工作原理和介紹 二維碼
1823
位置傳感器是СКТД-6465型雙讀數正余弦旋轉變壓器。當定位精度等級為Ⅰ、Ⅱ、Ⅲ級時,折算到傳感器軸上相應的位置誤差不超過±2’、±20’和±3’。控制信號與失調之間關系的輸出特性可以調節,并且能從線性關系變為二次曲線關系。輸出信號變化范圍在0~360°內調節。該裝置保證能夠編制減速運動(在**速度的20~100%范圍內調節)的程序。控制裝置(參看圖1)工作在兩種狀態;示教狀態和自動再現狀態。 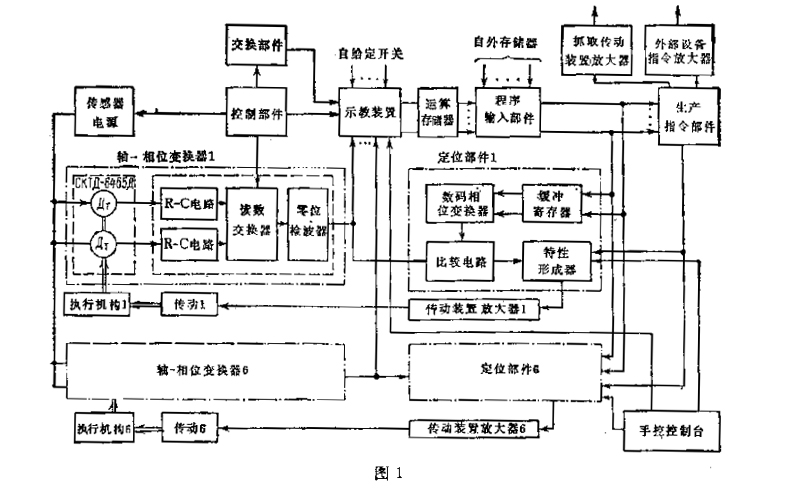 在示教狀態時,操作者借助手控控制臺將機器人機械手依次地引導到工作循環所以的點位處。同時操作人員用按鍵開關在控制裝置的面板上編排必要的生產指令。依照“寫入”信號(用手控控制臺上的按鈕),從位置傳感器和生產指令鍵讀出信號,并將信號存儲到運算存儲裝置中。示數時,在示數裝置中用相位-數碼變換器進行位置的數字測量。六個坐標共用一個變換器。每一個坐標相位移的形成器輪流地接到這一變換器上。在計數器中相位移變換成數碼。計數器計算等于相位移的時間間隔中的脈沖數目,計算器的計算頻率為1.6兆赫。 用安裝在控制臺上的轉換開關設置定位精度等級,并連同生產指令同時存儲起來。若存儲程序時,轉換開關處于“二級精度”或者“三極精度”的位置上(對應的非靈敏區為±20’和±3”),則僅將位置信息的粗讀數存儲到運算存儲器中。若轉換開關處于“一級精度”的位置上,除了粗讀數的程序段外,則還要自動地存儲包括含有精讀數位置信息的附加程序段。 在這種情況下,因為根據精度定位之前必須進入“二級精度”范圍內,所以粗讀數程序段中自動存儲“二級精度”指令,這就使得組讀書只整定在“二級精度”上。在必須實現要求的低速運動時,就編制“慢行”指令程序。將面板上的轉換開關置于速度降低值(**速度的20~100%范圍內)。 除上述外,還要編制接入外部設備、產生時間延遲、控制機械手手爪等生產指令程序。在給定“接通外部設備”指令時,操作者要將十二個閉鎖鍵中的一個鍵按下去。將外部設備的號碼進行編碼,并以二進制四位數碼的形式存儲在運算存儲器中。用五個獨立的鍵裝定延遲時間的大小。按下某一個鍵就是在總時間內增加了一定的時間(0.4、0.8、1.6、3.2、6.4之中的一個值)。 時間延遲指令以二進制五位數碼的形式存儲在運算存儲器中。用手控臺上的二位開關給出控制手抓指令,并以二位數碼的數字形式存入運算存儲器中。 每當編制程序程序,操作者在存儲下一個點位時要加入“程序結束”指令。假若程序的容量超過64個程序段,要編制“轉移”指令,轉移到存儲裝置的下一個區域。 在示教過程中,機器人機械手利用有熒光顯示程序段號碼的指示燈泡,操作者監視存入存儲器內的程序段數控。每當一個程序段寫入之后,往專用交換器中輸入移位一步的脈沖,以此進行程序段號碼的轉換。交換器給出存儲該程序段的運算存儲器數字單元地址。在示數開始時,操作者要將程序段交換器裝定在初始位置。能存儲程序段的**數目為64×8個。考慮到每存儲一個一級精度的點位要占用二個程序段,所以有可能存儲一級精度的點位不超過32×8個,而存儲二級或三極精度的點位不超過64×8個。 用A-211-8型磁芯運算存儲器作為存儲裝置。存儲容量為4096個十六位數碼語句,所以它能夠存儲8個程序,每個程序具有上面所說的精度和粗讀點位數目。程序段的容量等于8個十六位數碼語句。在運算存儲器中,地址以十六位二進制數碼輸出。頭三位碼表示程序區域的號碼,并由控制裝置面板上的轉換開關給出。在自動再現時,程序區域的號碼同樣可用外部信息給定,為此考慮了專門的輸入端。后面六位碼標志程序段的號碼。地址的最后三位碼標志序段語句的號碼,而且是用語句號碼交換器建立的。這個交換器是一個在存儲時進行記錄循環的計數器。除標地址外,在示教時語句地址碼交換器還用于位置測量通道的交換。因此,裝定交換器的工作頻率要考慮完成相位-編碼交換的時間,這一頻率在示教時定為100赫,在再現時為1.6千赫。  |

臺州捷眾智能裝備有限公司 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: www.gzfc168.cn 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾智能裝備阿里巴巴 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: jiezhongcnc.1688.com 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾微信公眾號 |  掃一掃手機網站 |