
|
|
文章詳情
工業機器人的液壓和氣動相結合的復合式傳動裝置 二維碼
886
在機器人中應用復合式傳動裝置直至目前仍是非常有限的,其原因首先就在于,機器人的使用管理復雜,因而在利用這點傳動裝置時就降低了機器人的可靠性。機器人中最常見的復合式傳動裝置的液壓和氣動相結合的傳動裝置。在各個傳動裝置同時工作的情況下,當氣動馬達作為執行馬達時,液壓傳動裝置可以用來改善動態特性,特別是用來穩定輸出環節的速度和提高整個傳動裝置的出力系數。這樣的組合就是氣-液式傳動裝置。假若采用液壓馬達作為執行馬達,那么復合系統中氣動傳動裝置就不能用液壓泵站作為能源了。這種復合傳動裝置就是液-氣式傳動裝置。 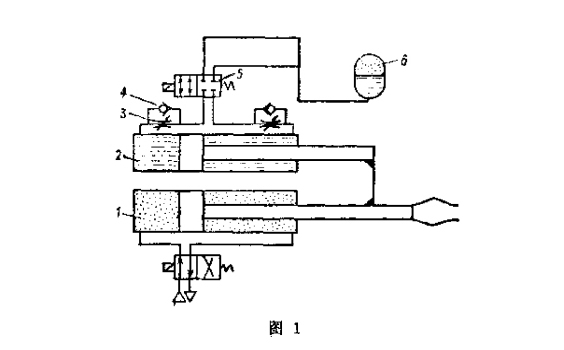 圖1給出了具有液壓調節速度和液壓定位的機器人機械手一個運動自由度的氣動液壓傳動裝置原理圖。 當空氣進入氣缸1的一個腔內時,在液壓配流器位于左邊位置時,活塞桿外移,其速度取決于相應的液壓節流閥3的調定值,所以就能夠保證有穩定的運動速度。單向閥4能保證液體自由地進入液壓缸2的充液腔內。為了補償液壓缸兩腔的容積差和漏油,圖中設置了油液儲能器6..液壓配流器能夠起到對機械手進行定位的液壓閉鎖作用。假若采用дд型與電控信號程正比的節流閥,那么,當所研究的傳動有位置反饋時,就能用于構造具有點位控制系統的工業機器人。在這種情況下,在定位范圍內保證穩定的“爬行”速度條件下,能夠用配流器5,根據位置傳感器的信號使工業機器人機械手在定位點上定位。 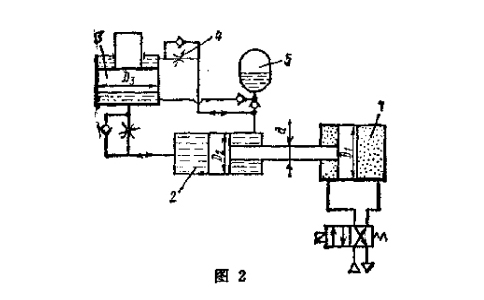 圖2給出液壓氣動傳動裝置原理圖。“阿烏托赫恩”(Аутохенц)、“ПР-10”和“旋風3Б”型機器人的垂直方向運動就是使用與這相似的原理,這三種機器人的能源是氣動管道系統。在這種情況下,液壓傳動裝置保證垂直移動并起放大器作用。 當往氣缸1的活塞腔內供氣時,液壓缸2的活塞腔內就產生壓力。液體進入到執行液壓缸3中。這時缸3的活塞移動,使機器人機械手有相應的運動。若氣缸的活塞反向運動液體進入缸3的有桿腔內。節流閥4能保證執行液壓缸的速度。蓄能器5來補償缸2的有桿腔和活塞腔的容積差以及漏油。現在來求液壓執行缸3的活塞桿所受的力。 液壓和氣動的復合傳動裝置的一個根本優點就是能夠在小于0.1米/秒和大于1米/秒很寬的范圍內穩定地調節速度。 理解描述液壓和氣動傳動裝置的方程式就能對所研究的復合式傳動裝置的動力學進行理論分析。根據對具有循環控制的液壓和氣動機器人計算所給出的數據,就可列出描述液壓和氣動傳動裝置的方程式。  |

臺州捷眾智能裝備有限公司 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: www.gzfc168.cn 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾智能裝備阿里巴巴 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: jiezhongcnc.1688.com 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾微信公眾號 |  掃一掃手機網站 |