
|
|
文章詳情
工業(yè)機器人系統(tǒng)和機械手控制系統(tǒng)按運動方式分類 二維碼
1628
在機器人系統(tǒng)中,根據(jù)給定的目的實現(xiàn)對運動的控制不需要事先給定運動軌跡(程序)。而是按外界環(huán)境瞬時狀態(tài)實現(xiàn)控制。外界環(huán)境的瞬時狀態(tài)是用相應的感受裝置確定的。圖1示出了控制有知覺的機器人的方塊圖。圖中的敏感裝置即是感受裝置。F——外部作用向量,它僅代表外界環(huán)境的變化。在這種情況下,是按輸出量X的差異函數(shù)進行控制。差異就是高效率機械手與目標(存在于外界環(huán)境中,并由向量G給定)的坐標之間的差值。這一類控制系統(tǒng)通常是閉環(huán)的,也就是有外部反饋的系統(tǒng),如圖1所示。  具有這種控制系統(tǒng)的機器人稱為有知覺的機器人。這種機器人的控制比程序控制復雜得多。這是因為,不可能預先編制運動程序,而且要求在運動過程中,根據(jù)所獲得周圍狀態(tài)的信息,實時確定控制作用。此外,當編制運動程序所需要的先驗信息不夠用時,或者這些信息在運動過程中不斷變化時,上述控制方法將是**可行的方法。 自行引導機械手的手爪移到物體所在之處,抓取任意放置的物體,機械手沿輪廓線運動(例如沿焊縫運動),繞過不是預先給定的或變動的障礙物等等,這些都是只有這種知覺的機器人才能夠完成的工作的最簡單的例子。 與程序控制機器人一樣有知覺的機器人控制作用的算法有兩種:求**運動規(guī)律和在給定的范圍內(nèi)求允許的運動規(guī)律。 在復合控制系統(tǒng)中采用了上述兩種基本控制方法,即程序控制和根據(jù)外界環(huán)境狀態(tài)進行控制。具有復合控制系統(tǒng)的機器人自然是由知覺的機器人。復合控制系統(tǒng)能保證**的控制品質(zhì)。原因是;**,它像程序控制系統(tǒng)一樣,**可能地使用了已有的、與當時工作有關(guān)的先驗信息,第二,系統(tǒng)在執(zhí)行程序的過程中,根據(jù)實際工作條件的變化不斷修正程序。因此,復合控制方法是控制有知覺機器人的最基本的和最普通的方法。 按對外界環(huán)境和其它工作條件變化的適應程度,有知覺的機器人控制系統(tǒng)可分為: (1)對外界環(huán)境狀態(tài)無適應的控制系統(tǒng); (2)適應控制系統(tǒng); (3)人工智能控制系統(tǒng)。 **種系統(tǒng)的控制算法(包括調(diào)整控制裝置的參數(shù)值)在系統(tǒng)自動工作的整個過程中是不變的。在適應控制系統(tǒng)中,當外界工作條件變化時,為了保證所要求的品質(zhì),或者是為了能隨著經(jīng)驗的積累而自行改善控制品質(zhì),控制裝置的結(jié)構(gòu)和參數(shù)應能隨時間自動改變。 人工智能系統(tǒng)是最完善、***的適應控制系統(tǒng)。這種控制系統(tǒng),在外界環(huán)境變化極端不定的條件下,能保證機器人由自主功能。這種系統(tǒng)應能重新處理由感受裝置獲得的有關(guān)外界環(huán)境的信息,并且建立動態(tài)可變的外界模型。在此基礎(chǔ)上制定出,在積累經(jīng)驗的過程中進行自我完善的行動計劃。換而言之,人工智能系統(tǒng)在某種程度上可以模擬人的智力活動,而且隨著自我完善程度的提高可以越來越接近人的智力水平。 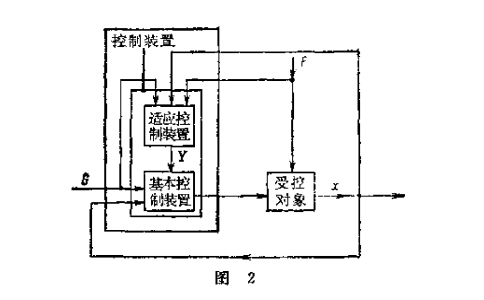 圖2所示為最簡單的機器人適應控制系統(tǒng)的方塊圖。圖中的基本控制裝置總受控對象的基本的非適應的控制裝置。適應控制裝置用來調(diào)整基本控制裝置,即根據(jù)外界工作條件及機器人機械手本身特性的變化,用作用Y改變基本控制裝置的算子,也就是改變裝置的結(jié)構(gòu),調(diào)整參數(shù)的大小以及變更程序(在基本控制裝置中采用復合控制的情況下)。為了調(diào)整適應控制裝置顯示出外作用F、G和控制裝置的狀態(tài)X。然后估計控制品質(zhì)(快速性、精度、經(jīng)濟性等)的某種預選指標(即判據(jù))。進而用重新調(diào)整基本控制裝置的方法來校正控制品質(zhì)的預選指標。 這樣,適應控制系統(tǒng)包括二個控制級。基本系統(tǒng)構(gòu)成**級,適應回路構(gòu)成第二級。 還可能有一級適應控制。當前一級適應控制裝置的工作條件變化時,這級控制裝置改變適應控制裝置的適應算法,從而調(diào)整適應控制裝置。此外,還可能有多級適應控制系統(tǒng)。在這種系統(tǒng)中,下一個適應控制級控制前一個適應控制級。這就擴大了控制系統(tǒng)正確完成自己任務(wù)的外界工作條件范圍,或者提高了系統(tǒng)完成任務(wù)的質(zhì)量。 和所有控制系統(tǒng)一樣,由適應控制裝置實現(xiàn)的自適應控制,可以按控制系品質(zhì)**,或者按給定的穩(wěn)定性指標,構(gòu)成開環(huán)系統(tǒng)或閉環(huán)系統(tǒng)。分級控制的各級控制裝置(在圖2中就是基本控制裝置和適應控制裝置)可以由結(jié)構(gòu)上各自獨立的部件來實現(xiàn),也可以由一臺電子計算機利用算法來實現(xiàn)。若將程序控制,按外界環(huán)境而作用的非適應控制、適應控制和人工智能控制、根據(jù)控制品質(zhì)依賴于工作條件的程度加以比較,則可做如下描述。 程序控制系統(tǒng)要求機器人所有工作條件完全不變。非適應控制系統(tǒng)和復合系統(tǒng)在機器人機械手感覺裝置監(jiān)控的參數(shù)范圍內(nèi)。可用改變相應的控制作用的方法(參看圖1)來反應外界環(huán)境的變化。適應系統(tǒng)還可以用改變控制算法(包括調(diào)整)來適應工作條件的變化。這樣可以改善控制品質(zhì),可以擴大保證系統(tǒng)正常工作條件的變化范圍以及可以在自我改善控制算法時改進工作質(zhì)量。適應控制系統(tǒng)的這些性質(zhì)隨著適應控制級數(shù)的增加而增大。引入操作人員的智能,這是適應控制系統(tǒng)進一步發(fā)展的方向,從而使機器人由自動控制過渡到自動化控制。  |

臺州捷眾智能裝備有限公司 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網(wǎng) 址: www.gzfc168.cn 地 址: 浙江省臺州市玉環(huán)市清港徐斗工業(yè)區(qū) | 捷眾智能裝備阿里巴巴 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網(wǎng) 址: jiezhongcnc.1688.com 地 址: 浙江省臺州市玉環(huán)市清港徐斗工業(yè)區(qū) | 捷眾微信公眾號 |  掃一掃手機網(wǎng)站 |