
|
|
文章詳情
機器人的定義和結構研究以及機器人機械手的介紹 二維碼
879
盡管機器人技術發展很快,但至今“機器人”這一術語仍無統一的、固定的概念。目前,這個術語的含義很廣,而且很直觀。有些人甚至把各種類型的控制論游戲裝置主從機械手、機械翻譯系統、會下棋和能講譜曲的電子計算機等等也都看成機器人。 一般來說,機器人可定義為完成機械動作的通用自動機。到目前為止,原則上仍是把完成體力勞動的人作為構造機器人的模型。機器人的特點是借助于感受裝置和執行機構能主動,而且有目的地和外界進行信息的和物理的相互作用。機器人對外界物體產生作用,并能在外界環境中行走。機器人的各個部分(分系統)由信息處理裝置(如電子計算機)聯結成統一的系統。在結構上,機器人的各個分系統組合成不同的機器人。 機械手是機器人主要的(目前還是**的)執行機構。但是,可以設想用強電磁場來操縱物體,也就是把強電磁場作為機器人的執行機構;可以設想讓強大激光裝置按所需要的方式對周圍物體進行作用,也就是把強大激光裝置作為機器人執行機構;可以設想其它類型的機器人執行機構。當然,在任何情況下,對外界物體產生靈活作用的執行機構是機器人必不可少的組成部分。本書下面講到執行機構時就是指機器人機械手。機器人的另一個必備的特征是通用性。不具備通用性就不能算做機器人。舉例說,只有一種程序的加料器,雖然是自動機機械手,但是由于功能不能夠調整,不應稱作機器人。不需要人參與操作,有自治能力也是機器人必備的特征。不具備這一特征也不應該認為是機器人。舉例說,由人遠程距離控制的充當電視攝像機的機械手以及其他各種類型的主從機械手,都不能列入機器人之列。 把機器人定義為完成機械動作的通用自動機,這是對所研究的新型機器下的廣義定義。當然,由于自治程序及操作人員參與特點的不同,各類機器人之間存在著本質上的差別。甚至機器人本身還有分工,這種分工是根據它們具體應用的特點而決定的。因此,各類機器人的通用程度有很大差別。 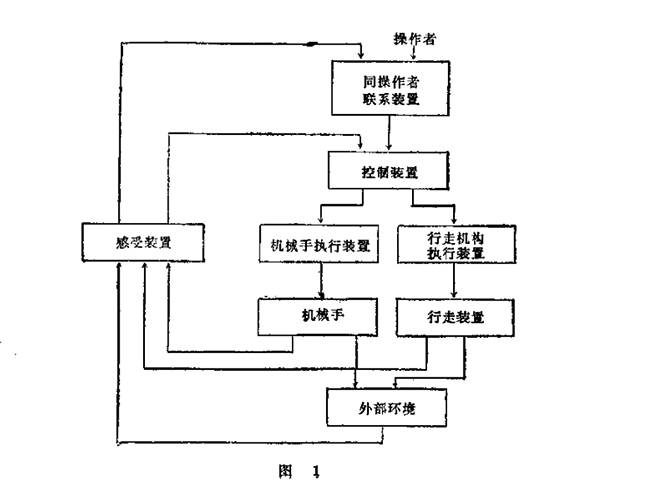 現在來研究機器人的一般結構(圖1)。機器人的推進作用是由執行機構來完成的,通常,機器人的執行機構包括機械手和行走裝置。 機械手是多環節開環機械裝置。它有完成旋轉和往復運動的關節,其自由度數目為3~10。這個機械裝置的最后一個環節(即工作機構)是手爪或其它任何專門的生產機械,如真空吸附盤、噴霧器、自動扳手等等。為了能夠在各環節位移最小的情況下保證執行機構有平滑的移動軌跡,必須正確地分配機械手傳動鏈的運動自由度。為此,機械手必須滿足如下基本要求: (1)可隨意改變手爪位置和方向; (2)在保持手爪位置和方向的條件下,可隨意改變機械手運動鏈在空間的形狀; (3)用于改變手爪方向的運動自由度不能對手爪終端位置有明顯的影響。 要按照機械手在工作范圍內的工作要求,即服務質量,來選擇各環節的長度。工作系數可作為一個質量標準。根據所要求的工作系數的大小確定各環節的長度,和確定各環節在機械手傳動鏈中的配置。 在確定手爪的結構使,通常要考慮某些定型工作。有的手爪做成勺罐形,有的有兩個或三個手指,有的有擾性手指等等。工作機構可同時帶有信息傳感器。這種信息傳感器能確定出操縱對象的各種參數,并能發出故障警報等。 機械手和行走裝置的執行機構是每個運動自由度的傳動裝置(參看圖1)。傳動裝置主要有三類;電動的、液壓的和氣動的。由于空氣壓縮性大和制造良好的氣動隨動系統相當復雜,所以氣動傳動的靈敏性很差。液壓傳動除需要專門的維護外,還由于漏油會引起環境污染。電傳動可以采用各種伺服電機和離合器。傳動裝置可直接安裝在機械手上面,即安裝在靠近實現相應的運動自由度的關節地方,或者安裝在固定機械手的基座上。分散配置傳動系統的優點是,由電動機到關節之間力的傳遞簡單,因而機械手的結構緊湊。集中配置傳動裝置可以簡化機械手的結構,并且可以比較自由地選擇傳動的形式和結構,但是,由傳動裝置向關節傳遞力需要齒輪、鏈條及鋼索等等。 機器人的行走裝置可采取已被廣泛應用的任何一種移動裝置。在地面上行走時,可利用履帶式、轉輪式、步行式及其它類型的推進器。 圖1所示的感受裝置可分為兩種主要類型,收集機器人內部狀態信息的裝置和收集外界環境信息的裝置。**類裝置用于機器人內部形成反饋。屬于**類裝置的有;測量機械手各環節的角位移和線位移的傳感器,測量機械手各環節的速度和加速度的傳感器。第二類裝置能夠根據外界環境的狀態對機器人實現適應性控制。屬于第二類裝置的有;觸覺傳感器和定位傳感器(它們可以獲得接觸或接近對象的信息,判斷簡單的對象的形狀)、力傳感器(如在裝配產品時,用來調節施加給操縱對象的力)和滑動傳感器(被操縱的對象從手爪中滑出時滑動傳感器有反應并產生信息)。視覺信息是反應外界環境最安全的信息。但是,由于識別圖像還有某些困難,所以視覺裝置至今未能廣泛地應用。在情況發生變化時,必須利用外部環境的信息來控制機器人。 與操作人員聯系的裝置(見圖1)是一套保證操作人員與機器人互相聯系的設備。由這些設備可以得到有關機器人操作情況的信息。視覺控制合就屬于這種裝置。操作人員由控制合能得到關于機器人操作的視覺信息。然后,操作人員在電視接收機的屏幕上用光標標出他所感興趣的目標的坐標,或者標出機器人應該移動到的目的地。通過控制合能夠將機器人各分系統的工作情況傳給打字機或者直觀顯示器。由控制臺也可以把來自機器人的詢問送給需要此信息的輸入端。在沒有視覺反饋時,繪圖機可向操作人員提供有關機器人在地面行走的信息,由繪圖機可以提供預計的運動軌跡。 用聲音可給機器人分配任務并可把機器人改裝成各種結構形式。現在已經有能分辨200個字詞的機器程序和專用裝置。用語言綜合器,或者,在最簡單的情況下,用記錄在錄音機磁帶上的信息,機器人也能夠用語音對操作人員作出回答。控制裝置(見圖1)能將感受裝置給出的全部信息加以變換,并產生出對傳動裝置的控制作用。 有時采用由一臺或數臺電子計算機組成的分級控制系統去控制機器人(如控制可移動的機器人)。機器人可裝上小型機載電子計算機。小型機載電子計算機控制傳動裝置,并將機器人上的傳感器的信息做預處理。信息的交換和控制作用的計算主要由固定式大型電子計算機來完成。大型電子計算機通過電纜或無線電與小型機載電子計算機聯系。當聯合控制幾個機器人時,可采用中心電子計算機和分散的小型電子計算機相結合的控制系統。分散的小型電子計算機附屬于中心電子計算機并控制單個機器人。  |

臺州捷眾智能裝備有限公司 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: www.gzfc168.cn 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾智能裝備阿里巴巴 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: jiezhongcnc.1688.com 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾微信公眾號 |  掃一掃手機網站 |